Imagining the graph of sinx and cosx, this identity in the first line seems obvious. Using partial integration, this formula can be derived as follows. In⟹In⟹I0⟹In=∫02πsinnxdx=∫02πsinx⋅sinn−1xdx=[−cosx⋅sinn−1x]02π+∫02πcosx⋅(n−1)sinn−2x⋅cosxdx=(n−1)∫02π(1−sin2x)sinn−2xdx=(n−1)∫02πsinn−2xdx−(n−1)∫02πsinnxdx=(n−1)In−1−(n−1)In=nn−1In−2=∫02πsin0xdx=[x]02π=2π,I1=∫02πsinxdx=[−cosx]02π=1=⎩⎨⎧nn−1⋅n−2n−3⋅n−4n−5⋅⋯⋅21⋅I0nn−1⋅n−2n−3⋅n−4n−5⋅⋯⋅32⋅I1(even n≥2)(odd n≥3)
By definition, the gamma function looks like the above. Moreover, by the substitution e−x=t, Γ(n+1)=∫0∞e−xxndx=∫10+t(−lnt)n(−t1dt)=∫0+1(−lnt)ndt=∫0+1(−lnx)ndx
The following two properties are worth remembering.
Γ(n)Γ(1−n)=sinnππ,
Γ′(1)=∫0∞e−xlnxdx.
3. Heaviside Cover-Up Method
The Heaviside cover-up method is a technique to make a partial-fractions decomposition of a rational function f(x)/g(x)whenever the denominator can be factored into distinct linear factors. g(x)f(x)⟹A1A2An=(x−r1)(x−r2)⋯(x−rn)f(x)=x−r1A1+x−r2A2+⋯+x−rnAn=(r1−r2)(r1−r3)⋯(r1−rn)f(r1),=(r2−r1)(r2−r3)⋯(r2−rn)f(r2),⋮=(rn−r1)(rn−r2)⋯(rn−rn−1)f(rn)
4. Integrals involving ax2+bx+c
When the integrands are functions of x and ax2+bx+c, the following substitution method is useful. Let α and β be the roots of ax2+bx+c such that α<β. ⎩⎨⎧a>0a<0⟹⟹⎩⎨⎧D>0D<0⟹⟹x−βa(x−α)=tax2+bx+c=t−axβ−xx−α=t
Note that D is the discriminant of ax2+bx+c. After setting as above, both sides should be squared to make the form of x=f(t).
5. Powers of Trigonometric Integrals
The following are indefinite integrals of powers of sinx and cosx. In⟹In⟹Jn=∫sinnxdx=∫sinx⋅sinn−1xdx=−cosx⋅sinn−1x−∫(−cosx)(n−1)sinn−2x⋅cosxdx=−cosx⋅sinn−1x+(n−1)∫sinn−2x(1−sin2x)dx=−cosx⋅sinn−1x+(n−1)∫sinn−2x−sinnxdx=−cosx⋅sinn−1x+(n−1)(In−2−In)=∫sinnxdx=−n1sinn−1x⋅cosx+nn−1In−2=∫cosnxdx=−n1cosn−1x⋅sinx+nn−1Jn−2
The following are indefinite integrals of powers of tanx and cotx. In⟹In⟹Jn=∫tannxdx=∫tann−2x⋅tan2xdx=∫tann−2x(sec2x−1)dx=∫tann−2xsec2xdx−∫tann−2xdx=n−11tann−1x−In−2=∫tannxdx=n−11tann−1x−In−2=∫cotnxdx=−n−11cotn−1x−Jn−2
The following are indefinite integrals of powers of secx and cscx. In⟹In⟹Jn=∫secnxdx=∫sec2x⋅secn−2xdx=tanx⋅secn−2x−∫(n−2)secn−2x⋅tan2xdx=tanx⋅secn−2x−(n−2)∫secn−2x(sec2x−1)dx=tanx⋅secn−2x−(n−2)∫secnxdx+(n−2)∫secn−2xdx=tanx⋅secn−2x−(n−2)In+(n−2)In−2=∫secnxdx=n−11secn−2x⋅tanx+n−1n−2In−2=∫cscnxdx=−n−11cscn−2x⋅cotx+n−1n−2Jn−2
∫0πsinmx⋅cosnxdx=⎩⎨⎧0m2−n22m(integers m and n, even m+n)(integers m and n, odd m+n),
∫0∞xsinmxdx=⎩⎨⎧02π−2π(m=0)(m>0)(m<0),
∫0∞x2sin2mxdx=2mπ,
∫0∞xtanxdx=2π,
∫01xsin−1xdx=2πln2,
∫0πxf(sinx)dx=2π∫0πf(sinx)dx.
7. When the Denominator of Integrand Includes Trigonometric Functions
Approaches for this type of integration differ on whether the denominator of integrand is a form of linear trigonometric function or quadratic trigonometric function. Note that it is better to use the way for the quadratic trigonometric function when the denominator of the integrand includes tanx. Even in the case of the double-angle form, using the approach for the quadratic trigonometric function is proper. ⎩⎨⎧tan2x=ttanx=t⟹sinx=1+t22t,cosx=1+t21−t2,tanx=1−t22t⟹sinx=1+t2t,cosx=1+t21
sinx and cosx for each case can be derived by drawing the right triangle satisfying tanx for t.
8. Cauchy-Schwarz Inequality
For two functions f and g, if these functions are continuous in [a,b], the following inequalities hold.
(∫abf(x)g(x)dx)2≤(∫abf(x)2dx)(∫abg(x)2dx),
(∫abf(x)dx)2≤∫abf(x)2dx.
9. Odd & Even Functions
By definition, a function f(x) is called the odd function when f(−x)=−f(x), or is called the even function when f(−x)=f(x). These functions have the following properties.
Even function × Even function ⟹ Even function
Odd function × Odd function ⟹ Even function
Even function × Odd function ⟹ Odd function
Even function + Even function ⟹ Even function
Odd function + Odd function ⟹ Odd function
Even function + Odd function ⟹ No Rule
Derivative of an Even function ⟹ Odd function
Derivative of an Odd function ⟹ Even function
10. Simpson’s Rule
Simpson’s rule is the approximation for definite integrals based upon a quadratic interpolation. First, for three real numbers x1, x2, and x3 such that x3−x2=x2−x1=h and x1<x2<x3, the integration of ax2+bx+c in [x1,x3] can be calculated as follows. Note that yi=axi2+bxi+c. ∫x1x3ax2+bx+cdx=[3ax3+2bx2+cx]x1x3=3a(x33−x13)+2b(x32−x12)+c(x3−x1)=6x3−x1(2a(x12+x1x3+x32)+3b(x1+x3)+6c)=62h((ax12+bx1+c)+(ax32+bx3+c)+a(x1+x3)2+2b(x1+x3)+4c)=3h(y1+y3+a(2x2)2+2b(2x2)+4c)=3h(y1+y3+4y2)
Now, to integrate a function f(x) in [a,b], the above result can be applied. Let h=(b−a)/2n, x0=a, x2n=b, and yi=f(xi). Then, the approximation of the integration of f(x) is ∫abf(x)dx≈3h(y0+4y1+y2)+3h(y2+4y3+y4)+⋯+3h(y2n−2+4y2n−1+y2n)=3h(y0+4(y1+y3+⋯+y2n−1)+2(y2+y4+⋯+y2n−2)+y2n)
This formula is called Simpson’s rule, and if f(x) is a four times-differentiable function, then the error E in the approximation is E≤180n4(b−a)5max(∣f(4)(ξ)∣)(a≤ξ≤b)
This is a method for calculating the volume of a solid of revolution when integrating along an axis perpendicular to the axis of revolution. If a function y=f(x) in [a,b] is rotating around the line x=m, then the volume is V=∫xnearxfar2π(x−m)f(x)dx
where xnear and xfar are each the closer point and the farther point to the rotation axis among a and b. Similarly, If a function x=f(y) in [c,d] is rotating around the line y=n, then the volume is V=∫ynearyfar2π(y−n)f(y)dy
where ynear and yfar are each the closer point and the farther point to the rotation axis among c and d. An example can be found here.
13. Pappus’s Centroid Theorem
The volume of a solid obtained by revolving a plane region R about a line l is V=2πρA
where ρ is the distance from l to the geometric centroid of R and A is the area of R. This theorem does not require integration to get a volume, but it might be hard to find the geometric centroid of R.
14. Center of Mass
Given that n particles Pi whose each with mass mi that are located to coordinates Pi(xi,yi,zi), the center of mass (xc,yc,zc) is (xc,yc,zc)=i=1∑nmi1(i=1∑nmixi,i=1∑nmiyi,i=1∑nmizi)
If the mass distribution is continuous, for the total mass M, M(xc,yc,zc)=(∫xmdm,∫ymdm,∫zmdm)
where (xm,ym,zm) is the center of the infinitesimal mass dm. The key property related to this is for a fragmented shape S on a plane. Assume that S is fragmented into S1,S2,⋯. Also, let the distances from an axis l to each fragment be d1,d2,⋯. Then, the center of S is located at a distance d from l such that Sd=S1d1+S2d2+⋯
15. Double Integral
The following are techniques to calculate a double integral.
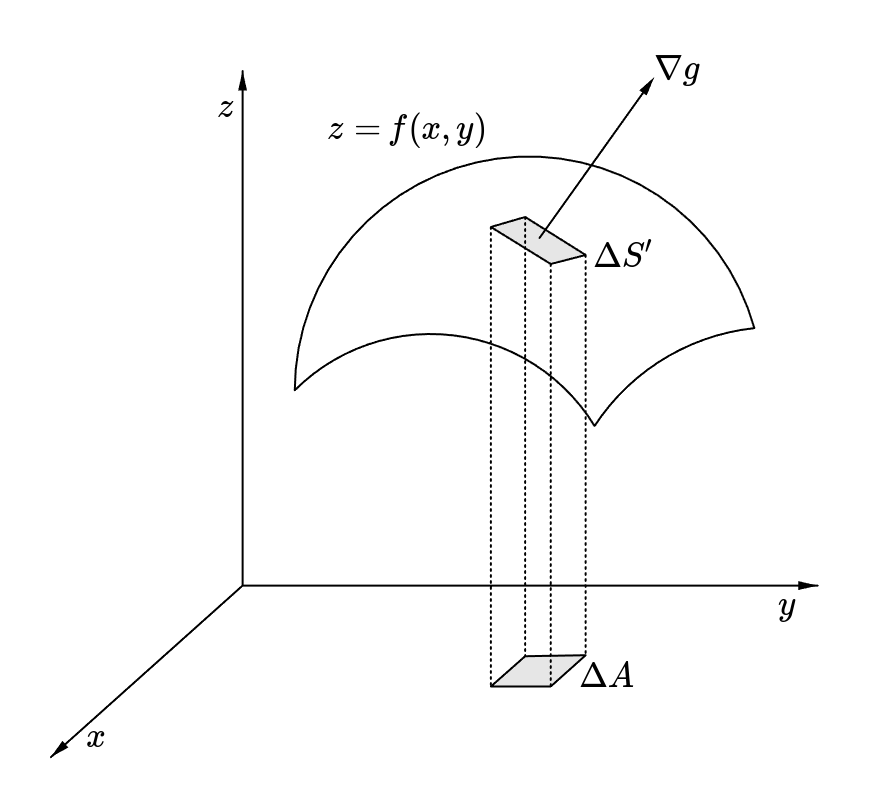
To calculate the surface area defined by z=f(x,y), let this area be S and A be the projected area of S on xy-plane. Then, ΔA=ΔxΔy. Now, considering the right rectangle prism with ΔA as its base, this prism slices the surface so that the sliced curved surface area is ΔS. For a point P within the ΔS region, the tangent plane at P slices the right rectangle prism so that the sliced plane area is ΔS′. So, it implies that the projection of ΔS′ on xy-plane is ΔA. The normal vector of this tangent plane can be obtained from the gradient ∇g where g(x,y,z)=z−f(x,y). Moreover, the angle θ between this tangent plane and xy-plane can be computed by the dot product of their normal vectors. ⟹ΔA=ΔS′cosθ,∇g=(−∂x∂f,−∂y∂f,1)=(−fx,−fy,1)cosθ=∥∇g∥∇g⋅(0,0,1)=1+fx2+fy21⟹ΔS′=1+fx2+fy2ΔxΔy
Since ΔS′ is approximately same as ΔS when Δx and Δy approach 0, the curved surface area of f(x,y) whose projection on xy-plane is defined in a region D is calculated as follows. Δx,Δy→0limΔSΔS′=1⟹S=∬D1+fx2+fy2dxdy
Keep going!Keep going ×2!Give me more!Thank you, thank youFar too kind!Never gonna give me up?Never gonna let me down?Turn around and desert me!You're an addict!Son of a clapper!No wayGo back to work!This is getting out of handUnbelievablePREPOSTEROUSI N S A N I T YFEED ME A STRAY CAT