Properties of Projection Matrix
- 1. Projection matrix has a null vector.
- 2. Each column of projection matrix represents the specific image.
- 3. Each row of projection matrix represents the specific plane.
- 4. Principle point
- 5. Backprojection
- Reference
1. Projection matrix has a null vector.
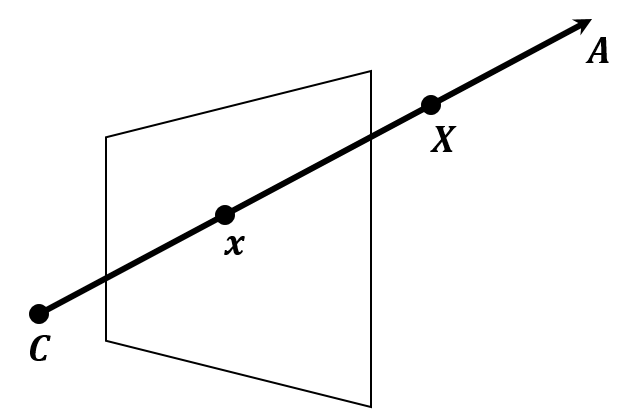
- Projection matrix is a matrix, so it must have a null vector. This null vector is the center of the camera.
- For some point , there exists a point on the line passing through points and . In other words, there is a such that . Let be the image of , then .
- All the points on the line passing through points and are projected on the same image .
- If moves, then the image is moved as well.
- satisfied with this property is the only one, the center of the camera.
2. Each column of projection matrix represents the specific image.
- Let where is a column vector.
- In world coordinates, the points which are located on , , and -axis at infinity are , , and .
- The images of these points are , , and .
- The image of the origin in world coordinates is ,
- To sum up, , , and are the images of points on , , and -axis at infinity. is the image of the origin in world coordinates.
3. Each row of projection matrix represents the specific plane.
- Let where is a row vector.
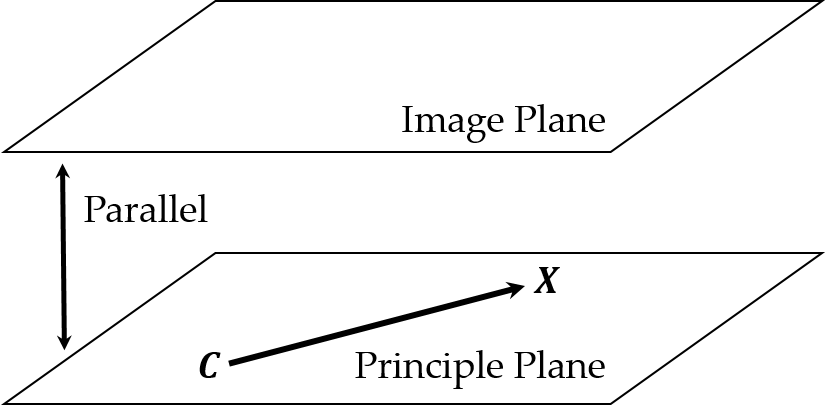
- For the point on the principle plane which is parallel with the image plane and passes through the camera center, form.
- Since the line passing through points and is parallel with the image plane, this line intersects with the image plane at infinity whose image is also at infinity.
- , which means that is on the plane .
- In the same way, the point such that is on the plane and the point such that is on the plane .
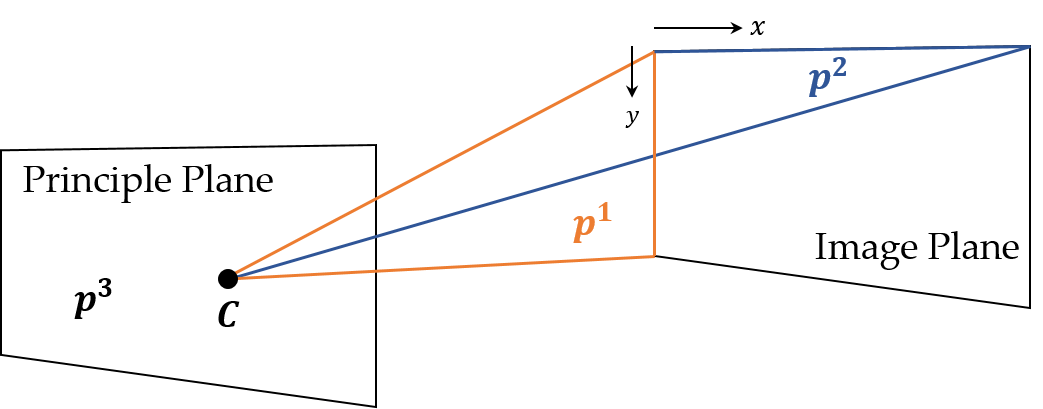
- and are called axis planes, and is called the principle plane.
4. Principle point
- Principle axis is the line passing through point and perpendicular to the principle plane. So is the normal vector of the principle plane.
- The point in the normal direction of the principle plane at infinity is where is the element of .
- The image of is called principle point.
5. Backprojection
- For an image , its world point is where .
- .
- As , is full-rank. So, is invertible.
- For the ray passing through point and the image , an arbitrary point on this ray can be represented as a linear combination such that .
Reference
[1] Hartley, R. and Zisserman, A. (2003) Multiple View Geometry in Computer Vision. 2nd Edition, Cambridge University Press, Cambridge.