C is the conic as matrix representation which is symmetric. In addition, all kC(k=0) are the same conic.
2. The tangent to the conic
Let the point x be on the conic C and on the line l. It means xtCx=0 and ltx=0. If there exists another point y such as x, ytCy=0 and lty=0.
For any α>0, (x+αy)tC(x+αy)=xtCx+α2ytCy+αytCx+αxtCy=0+0+0+0=0. It implies that all the points on the line passing through points x and y are also on C, so it is a contradiction. Therefore, l is the tangent to the conic and l=Cx.
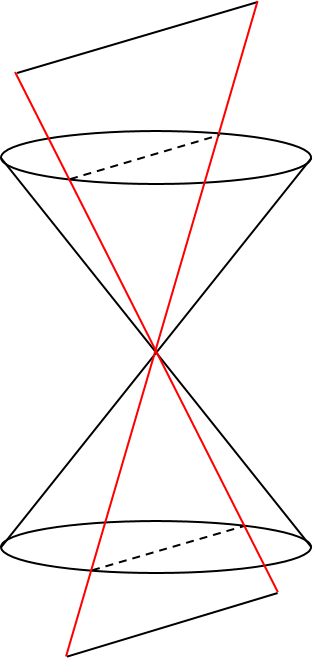
3. Degenerate conic
When a double conic is divided by a plane passing through its center, its cross section is two lines, not parabola, hyperbola, circle, or ellipse. These two lines l and m are a degenerate conic C∞ such that C∞=lmt+mlt.
Since xtC∞x=0, ltx=0, and mtx=0, C∞=lmt+mlt and rank(C∞)=2.
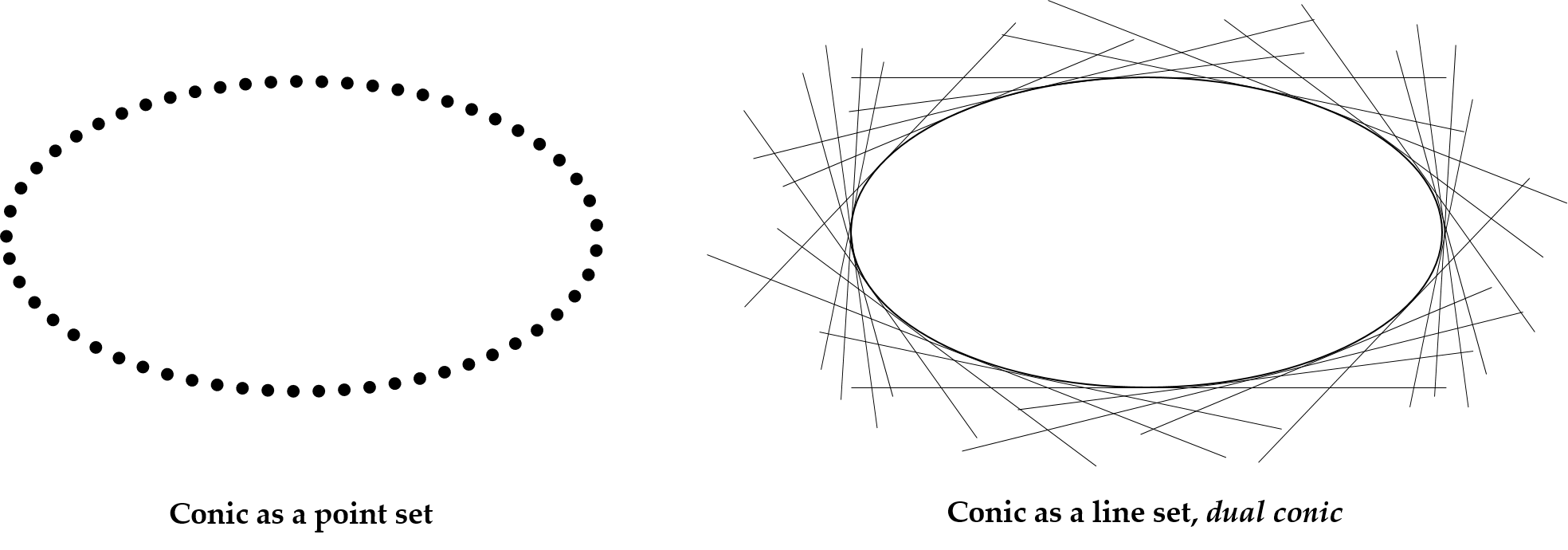
4. Dual conic
A conic on a plane is a set of points, but it can be viewed as a set of tangents to each point which is called dual conic.
The conic C satisfies xtCx=0 for a point x on C, and the dual conic C∗ satisfies ltC∗l=0 for the tangent to the x.
If a point x is on the conic C, then the tangent l to x is l=Cx, so x=C−1l.
xt=ltC−t=ltC−1 since C is symmetric. It implies that xtCx=(ltC−1)l=0. Therefore, C∗=C−1.
5. Homography of conic
Assume that a point x is on the conic C and a line l is on the dual conic C∗ of C. These are transformed to x′, C′, l′ and C′∗ by a homography H.
From xtCx and x′=Hx, x′tH−tCH−1x′=0, so C′=H−tCH−1.
The tangent l to x satisfies ltx=0, so ltx=lt(H−1x′)=(ltH−1)x′=0=l′tx′. It means l′=H−tl.
From ltC∗l=0 and l′=H−tl, l′tHC∗Htl′=0, so C′∗=HC∗Ht.
6. Circular points: all the circles intersects with l∞ at two points
All the circles have b=0 and a=c from the conic equation ax12+bx1x2+cx22+dx1x3+ex2x3+fx32=0.
If we set a=1, x12+x22+dx1x3+ex2x3+fx32=0.
The intersection point with l∞ is at infinity, so x3=0 and it reduces to x12+x22=0.
In homogeneous coordinates, this has two solutions, (x1,x2)={(1,i),(1,−i)}.
Therefore, the circular points are (1,i,0)t and (1,−i,0)t.
7. Dual degenerate conic
It is the dual of degenerate conic C∞=lmt+mlt.
Degenerate conic is defined by lines, so its dual is defined by points.
Let the circular points be U and V, the dual degenerate conic C∞∗ satisfies C∞∗=UVt+VUt.
As the dual of xtCx=0 form is ltC∗l=0, C∞∗ consists of the lines such that ltC∞∗l=0.
C∞∗ is invariant to similarity homography. This homography H is
H=(A0v1)
where AAt=λ2I2. Since C∞′∗=HC∞∗Ht, C∞′∗=(A0v1)(I000)(Atvt01)=(A0v1)(At000)=(λ2I000)≡(I000)=C∞∗
8. Quadric
Quadric is similar to conic and is defined in one more higher dimension than that of conic.
Quadric Q is a 4×4 symmetric matrix and xtQx=0 for the point x on Q.
As rank(C)=3 for a conic C in general except for the degenerate conic whose rank(C∞)=2, quadric Q is, in general, rank(Q)=4 except for the degenerate quadric whose rank(Q∞)=3.
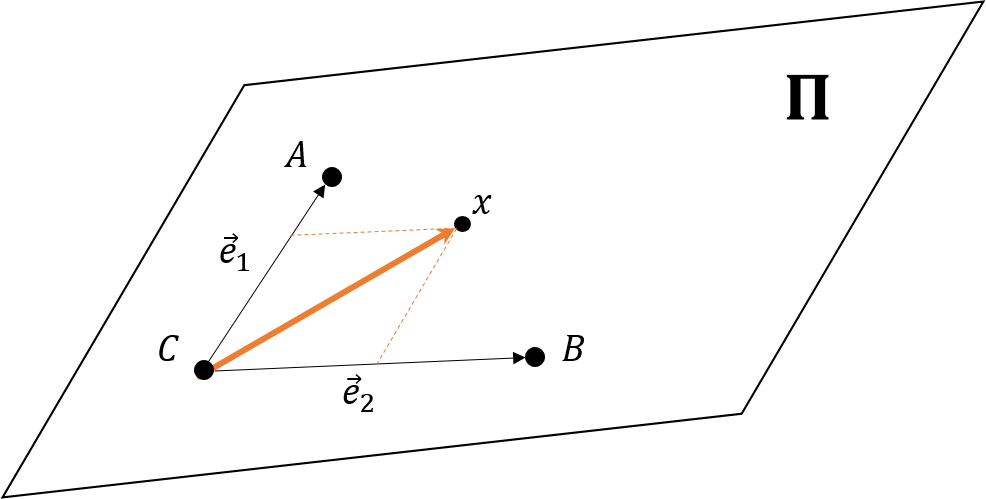
9. The intersection of quadric and plane is a conic
For the non-colinear points A, B, and C are on a plane Π, a point x on Π is represented as x=uA+vB+wC for some u, v, c∈R. In other words, x=(A,B,C)(u,v,w)t=Mp where M is a 4×3 matrix and p is a 3×1 matrix.
If x is on the intersection area of a quadric Q and Π, xtQx=0 and ptMtQMp=0.
In fact, p can be represented in homogeneous coordinates which is composed of A, B, and C. It means that x=me1+ne2=m(A−C)+n(B−C)=mA+nB−(m+n)C where m=u, n=v, and w=−m−n.
Therefore, pt(MtQM)p can be considered as the conic C where C=MtQM for the point p on C.
10. The tangent to the quadric
For the point x on the tangent plane Π to the quadric Q, xtQx=0 and Πtx=0. It implies that Π=Qtx=Qx. This property is corresponding to that of conic.
11. Dual quadric
A quadric is a set of points, but it can be viewed as a set of tangent planes to each point which is called dual quadric.
The quadric Q satisfies xtQx=0 for a point x on Q, and the dual quadric Q∗ satisfies ΠtQ∗Π=0 for the tangent plane to the x.
The tangent plane Π on the quadric Q satisfies Π=Qx, so xtQx=ΠtQ−tQQ−1Π=0. It means Q∗=Q−t=Q−1. This property is corresponding to that of conic.
12. Homography of quadric
Assume that a point x is on the quadric Q and a plane Π is on the dual quadric Q∗ of Q. These are transformed to x′, Q′, Π′, and Π′∗ by a homography H.
From xtQx and x′=Hx, x′tH−tQH−1x′=0, so Q′=H−tQH−1.
From ΠtQ∗Π=0 and Π′=H−tΠ, Π′tHQ∗HtΠ′=0, so Q′∗=HQ∗Ht.
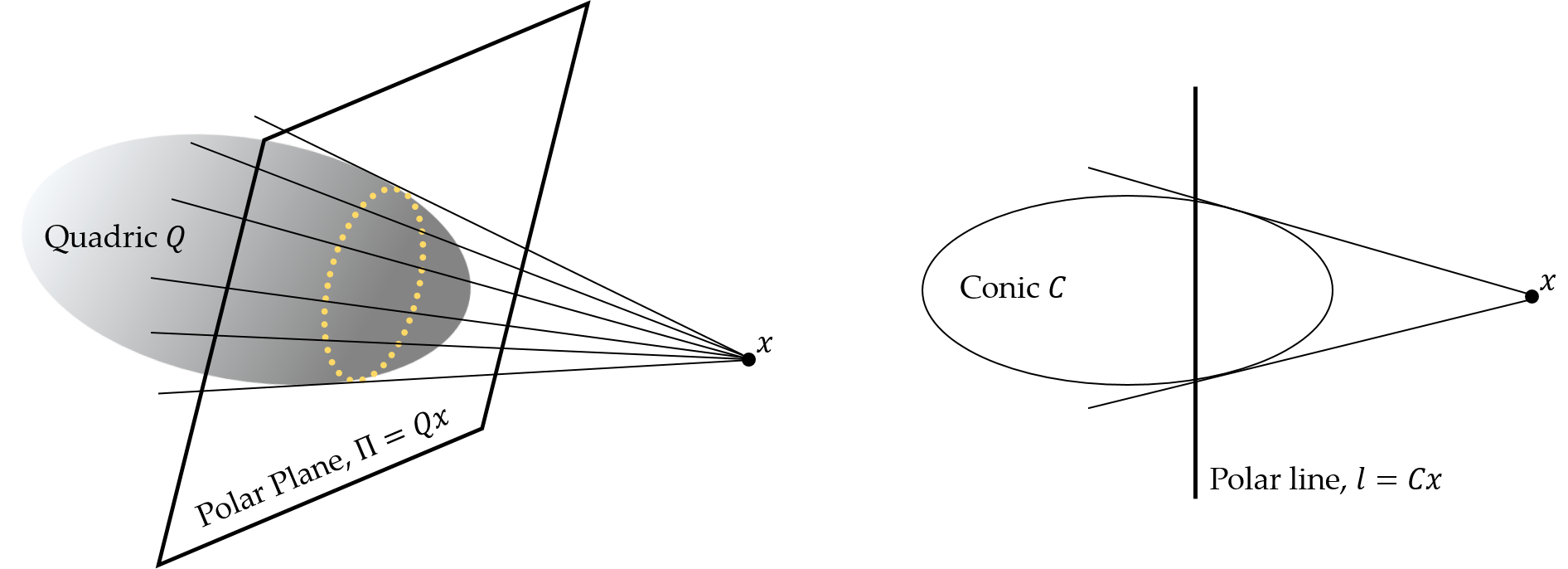
13. What Qx stands for where the point x is NOT on the quadric Q
Qx means a polar plane when the point x is not on the quadric Q.
In other words, the polar plane consists of the planes which passes through x and tangent to Q. This property is corresponding to that of conic which is called polar line.
Assume that the point y is on Q and its tangent plane Qy passes through x. So, (Qy)tx=0=ytQtx=ytQx. Since ytQx is a scalar, ytQx=(ytQx)t=xtQty=(Qx)ty. Therefore, Qx is the polar plane.
Assume that the point y is on a conic C and its tangent line Cy passes through x. So, (Cy)tx=0=ytCtx=ytCx. Since ytCx is a scalar, ytCx=(ytCx)t=xtCty=(Cx)ty. Therefore, Cx is the polar line.
14. Absolute conic: all the spheres intersect with Π∞
A sphere is a kind of a quadric, so the intersection of a sphere and Π∞=(0,0,0,1)t is a conic.
All the spheres satisfy x12+x22+x32+dx1x4+ex2x4+fx3x4+gx42=0 for the point (x1,x2,x3,x4)t in homogeneous coordinates.
The intersection with Π∞ is at infinity, so x4=0 and it reduces to x12+x22+x32=0.
This form can be changed as (x1,x2,x3)I(x1,x2,x3)t=0 which is of conic form. This conic is on Π∞ and consists of the only imaginary part, which is called the absolute conic.
The absolute conic is denoted by Ω∞.
The dual of Ω∞ is called absolute dual quadricΩ∞∗,
⎝⎛1000010000100000⎠⎞
For all the planes Π=(x1,x2,x3,x4)t such that (x1,x2,x3)(x1,x2,x3)t=0, Π is tangent to the Ω∞. Moreover, this Π satisfies ΠtΩ∞∗Π=0, which is the dual quadric form.
Geometrically, Ω∞∗ consists of all the tangent planes of Ω∞.
15. Projection of Ω∞
When the point x=(x1,x2,x3,0)t on Π∞ is projected by P, the image of x is
where K is the intrinsic matrix of the camera, R is the rotation matrix, E is the camera center, H=KR and x=(x1,x2,x3)t. It means that x is the direction to the intersection with Π∞.
Ω∞ is defined by this x which satisfies xtΩ∞x. Moreover, Ω∞ can be transformed by this H as follows:
x and Ω∞ are transformed to ω and Hx by H. Since x is on the Ω∞, Hx should be on ω which means (Hx)tω(Hx).
(Hx)tω(Hx)=(Hx)t(K−tK−1)(Hx)>0 yields that K−tK−1 is positive definite. Therefore, all this kind of Hx are imaginary.
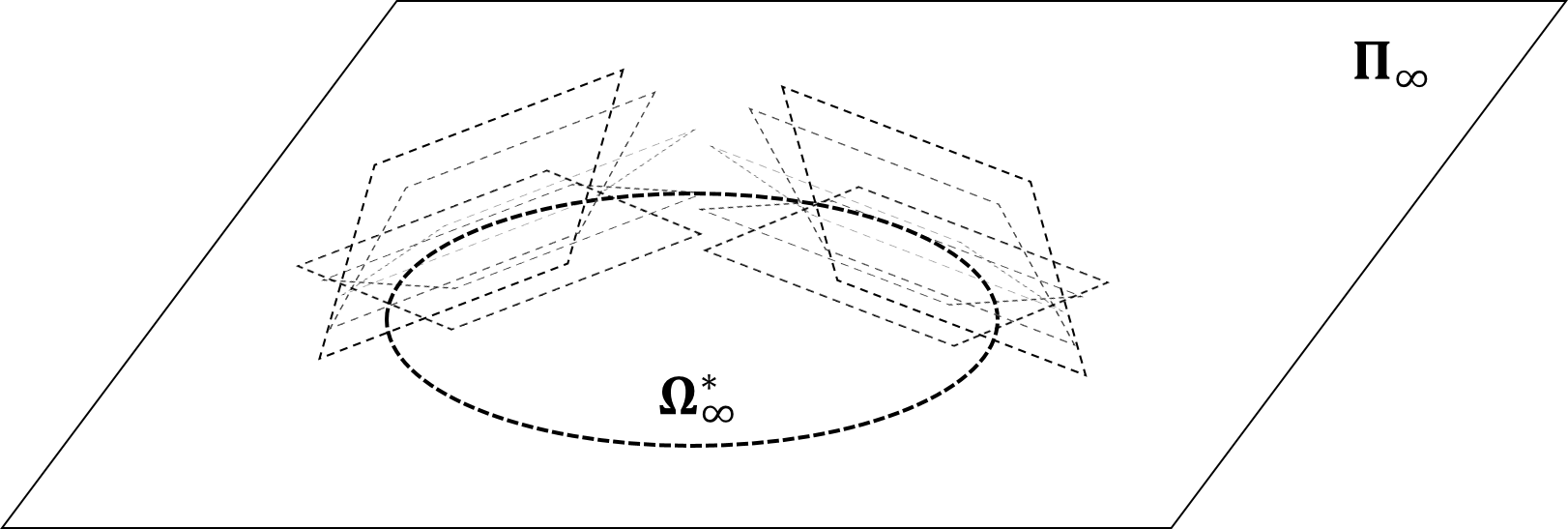
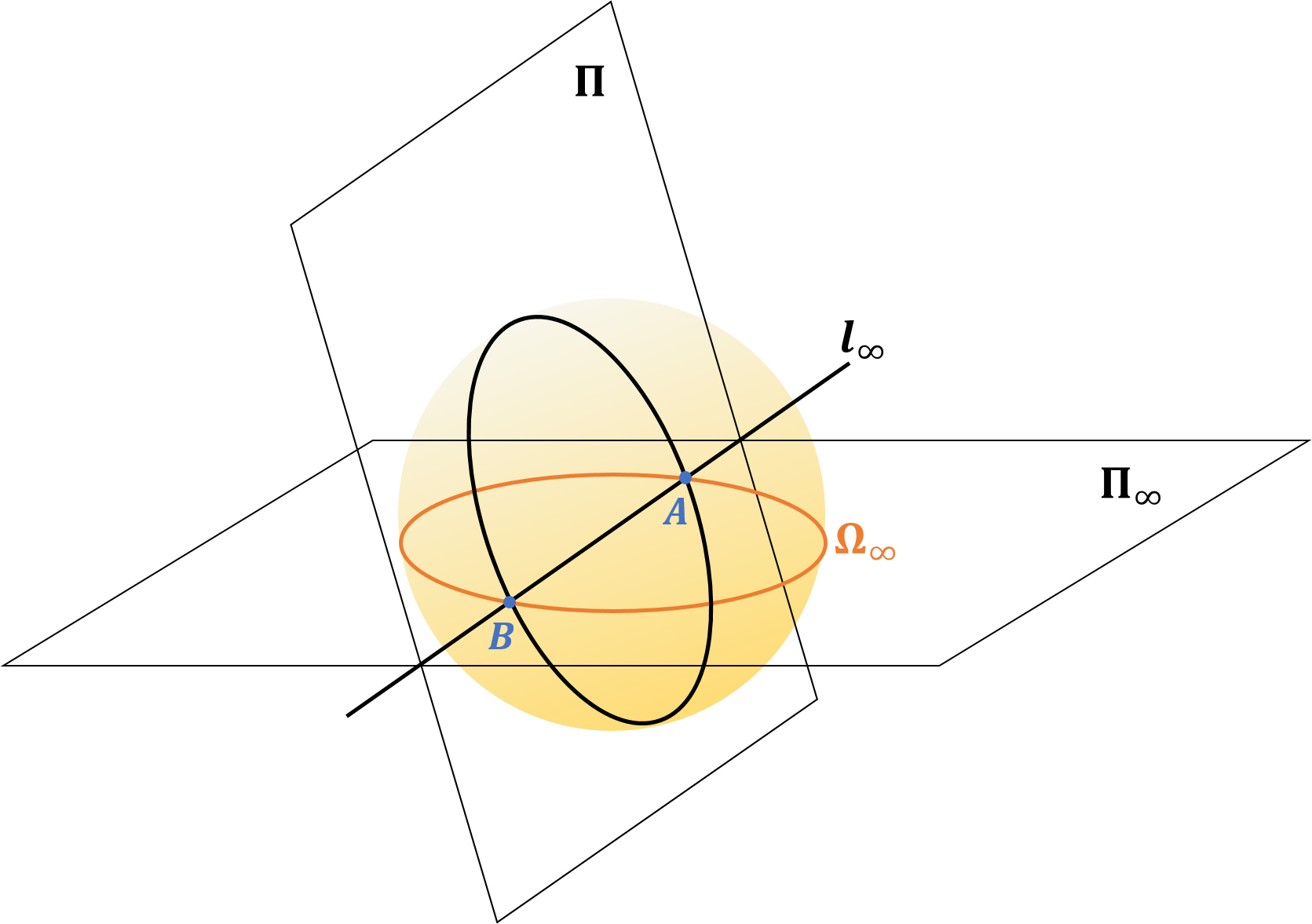
16. All the planes intersect with Ω∞ at circular points
Since Ω∞ is on Π∞, l∞ is also on Π∞. An arbitrary plane Π includes any circles, so these circles intersect with l∞ at circular points. It means that this Π includes l∞.
For a circle on Π, there exists the sphere including this circle. This sphere also intersects with Π∞ because all the spheres intersect with Π∞ at absolute conic Ω∞. Therefore, this sphere includes Ω∞. As a result, the intersection of Ω∞ and l∞ is circular points.
Keep going!Keep going ×2!Give me more!Thank you, thank youFar too kind!Never gonna give me up?Never gonna let me down?Turn around and desert me!You're an addict!Son of a clapper!No wayGo back to work!This is getting out of handUnbelievablePREPOSTEROUSI N S A N I T YFEED ME A STRAY CAT